Problem Statement
|
Create an industrial rolling cart equipped with a robotic arm that can be quickly and easily docked into any of a series of workstations and begin processing parts within 10 minutes.
|

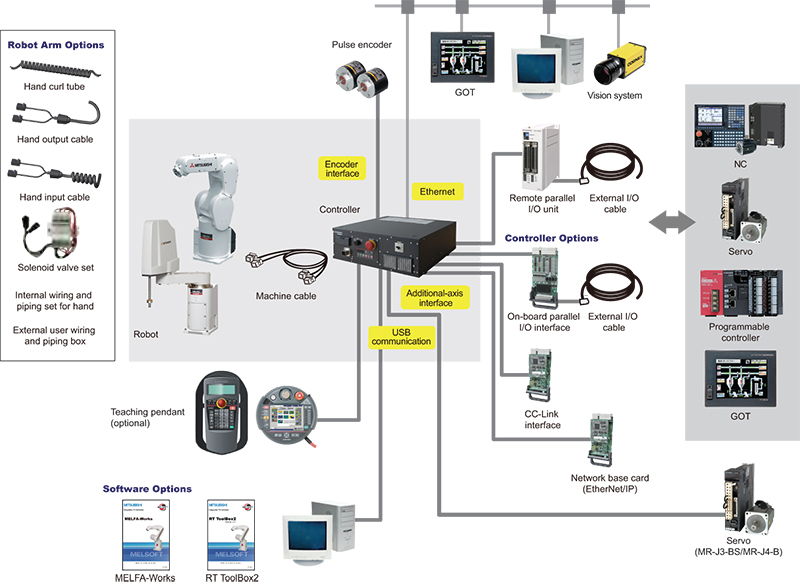
Mitsubishi Robot used on robot cart.
|
Solution & Results
A stand alone robot cart was developed by the team at L2F Inc using a Mitsubishi RV-2F robot. The robot arm was equipped with a gripper capable of handling the same product tray used along the manufacturing line. The cart easily docked into place using a 3-pin alignment arrangement and locked into place with four bolts. A single wire harness containing power, data and compressed air had to be connected to complete the installation. Once the robot was docked into position the robot had to be taught the task to be performed. I developed a novel lead through teach algorithm to allow operators to directly manipulate the robot arm as they taught new robot positions. Alignment features were used to provide accurate guidance as operators pushed the robot into its process positions.
The final solution was able to be swapped in and taught all process positions within the 10 minute goal. After demonstrating the method I accompanied the machine to a factory in Shanghai where I assisted with the installation and operator training on the pilot lines. The design was replicated for the remainder of the manufacturing lines at the factory.
I worked with the client's engineering team to develop a communication protocol and enabled our system to function with the factory's automation manager system. This allowed for increased reliability of data as individual products could be tracked as they proceeded through the various processing stations.
The final solution was able to be swapped in and taught all process positions within the 10 minute goal. After demonstrating the method I accompanied the machine to a factory in Shanghai where I assisted with the installation and operator training on the pilot lines. The design was replicated for the remainder of the manufacturing lines at the factory.
I worked with the client's engineering team to develop a communication protocol and enabled our system to function with the factory's automation manager system. This allowed for increased reliability of data as individual products could be tracked as they proceeded through the various processing stations.